矩阵C的学名叫摄像机内参矩阵,矩阵Tm叫摄像机外参矩阵,其中内参矩阵是需要事先进行摄像机标定得到的,而外参矩阵是未知的,需要我们根据屏幕坐标(xc ,yc)和事先定义好的Marker 坐标系以及内参矩阵来估计Tm,然后绘制图形的时候根据Tm来绘制(初始估计的Tm不够精确,还需要使用非线性最小二乘进行迭代寻优)。
比如使用OpenGL绘制的时候就要在GL_MODELVIEW的模式下加载Tm矩阵来进行图形显示。
2、 Marker-Less AR
基本原理与Marker based AR相同,少妇乳大丰满它可以用任何具有足够特征点的物体(例如:书的封面)作为平面基准,而不需要事先制作特殊的模板。摆脱了模板对AR应用的束缚。它的原理是通过一系列算法(如:SURF,ORB,FERN等)对模板物体提取特征点,并记录或者学习这些特征点。
当摄像头扫描周围场景,会提取周围场景的特征点并与记录的模板物体的特征点进行比对,如果扫描到的特征点和模板特征点匹配数量超过阈值,则认为扫描到该模板,然后根据对应的特征点坐标估计Tm矩阵,之后再根据Tm进行图形绘制(方法与Marker-Based AR类似)。
LBS-Based AR



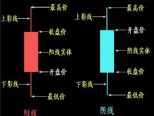 最详细的K线入门基
最详细的K线入门基 为双方交往丰满性感
为双方交往丰满性感 四川白玉县:首次发
四川白玉县:首次发 女性私处颜色深,是
女性私处颜色深,是 学生党最爱的简笔画
学生党最爱的简笔画 生活在海拔最高处的
生活在海拔最高处的 这几款秋冬养生的膏
这几款秋冬养生的膏



 发表于
发表于 




